
3D reconstruction
Automated reconstruction of 3D object on embedded system for mobile apps
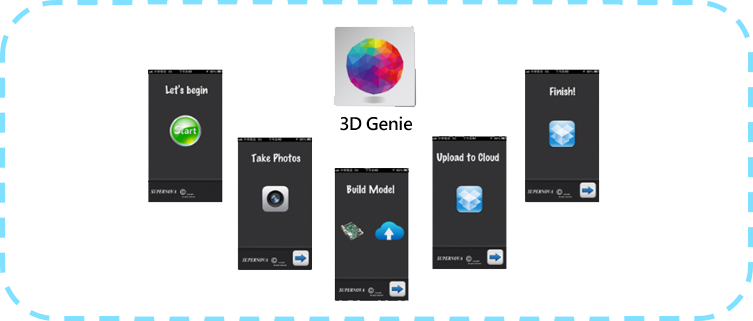
A light-weight 3D object reconstruction system is proposed. It aims to fulfill the increasing demand for fast and reliable 3D reconstruction in a mobile environment. Thereby, people can directly use their own device (e.g. mobile phone or tablet) to reconstruct desired objects into 3D models. The system is implemented and tested on an embedded board, MIO-5250, that is equipped with the recent Intel Atom N2600 series. Related results have been awarded Silver Award (prize: NT$ 50,000) – Intel Taiwan Intelligent Systems Design Student Contest 2013.
kinect fusion-based light-weight 3D reconstruction and mapping
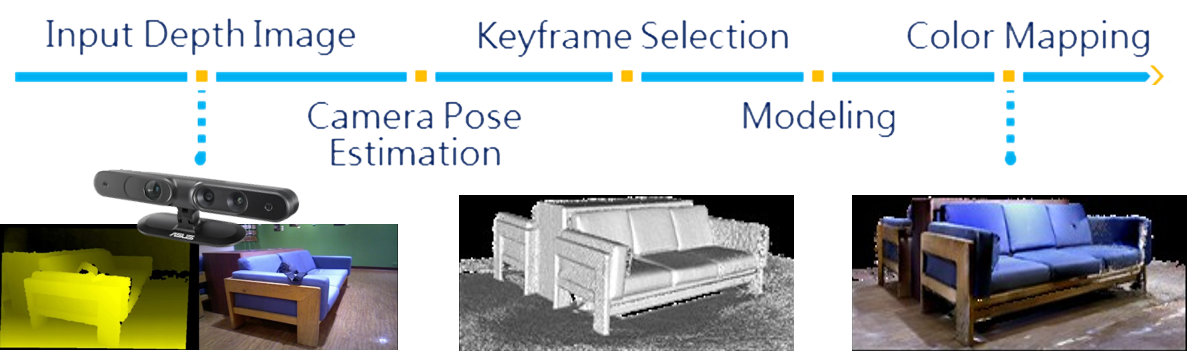
We aim to develop a 3D reconstruction system that suitable for mobile environment. The proposed system is inspired by the state-of-the-art algorithm KinectFusion, and some extension are applied to achieve specific goals. To be clear, our specific goals are a textured 3D result and light reconstruction system (around one to two minutes for general case).
Large-scale reconstruction
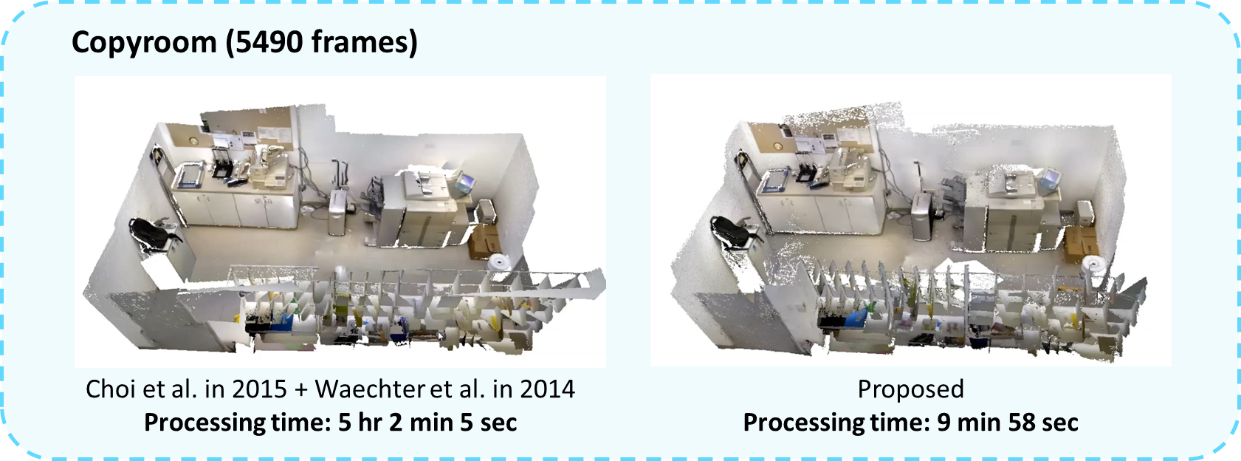
An efficient 3D reconstruction system is proposed to solve the high computational complexity problem in reconstructing large-scale 3D scene. Steps of the system include camera pose estimation, modeling, mesh simplification, and color mapping. Key of the proposed system is the pose-based keyframe selection method in stages of modeling and color mapping, which can filter out the redundant data and significantly decrease the computational complexity. Results show that large-scale scenes can be robustly reconstructed within few minutes while maintaining good quality of reconstructed 3D model.
Non-rigid reconstruction
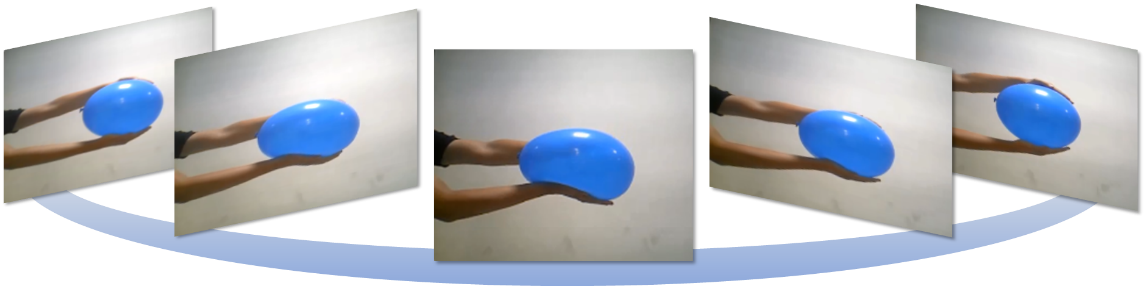
Many existing 3D scanning systems use rigid alignment algorithms and thus require the object or scene to be static during scanning process. In many scenarios such as reconstructing children and animals, nonrigid movement is inevitable. To extend the application of 3D reconstruction, it is necessary to develop the 3D scanning system which is able to track dynamic objects. The non-rigid 3D reconstruction is a difficult task in many parts especially for its high computational complexity. Hence, we plan to develop alternative solution to accelerate the process of non-rigid 3D reconstruction.